La robótica, en su incansable búsqueda por emular y superar las capacidades biológicas, nos ha presentado una diversidad asombrosa de máquinas. Desde brazos industriales de precisión milimétrica hasta vehículos autónomos que prometen transformar nuestras ciudades, cada avance nos acerca a un futuro donde la interacción con sistemas inteligentes es más fluida y natural. Sin embargo, uno de los santos griales en este campo siempre ha sido la creación de un robot que no solo sea capaz de moverse con agilidad en entornos variados, sino que también pueda reconfigurar su propia estructura para maximizar su eficacia. La aparición de un perro robot con la capacidad de caminar, rodar y, sorprendentemente, dividirse en dos unidades independientes para adaptarse a cualquier situación, marca un hito significativo en esta trayectoria evolutiva. No estamos ante una simple mejora incremental, sino frente a una reformulación audaz de lo que significa la adaptabilidad robótica, abriendo un abanico de posibilidades que hasta hace poco pertenecían exclusivamente al ámbito de la ciencia ficción. Este desarrollo no solo desafía las nociones preestablecidas sobre el diseño robótico, sino que también promete revolucionar industrias enteras, desde la exploración de entornos peligrosos hasta la logística de almacenes complejos, demostrando un potencial de impacto que merece una exploración profunda y detallada.
La evolución de la robótica biomimética
Desde los albores de la robótica, la naturaleza ha sido una fuente inagotable de inspiración. Observar cómo los seres vivos se mueven, interactúan con su entorno y superan obstáculos ha impulsado a ingenieros y científicos a imitar esas soluciones biológicas en la creación de máquinas. La biomimética, la ciencia de imitar a la naturaleza para resolver problemas humanos, ha sido particularmente fructífera en el diseño de sistemas de locomoción robótica. Los robots cuadrúpedos, comúnmente denominados "perros robot" por su semejanza con la marcha canina, son un ejemplo paradigmático de esta tendencia. Su capacidad para navegar terrenos irregulares, subir escaleras y mantener el equilibrio en condiciones adversas se debe en gran medida a la replicación de principios biomecánicos observados en animales. Sin embargo, la naturaleza ofrece más que solo la marcha. Consideremos la eficiencia del movimiento rodante en terrenos planos o la capacidad de ciertos organismos para cambiar su forma o incluso dividirse para acceder a espacios reducidos o realizar tareas colaborativas. Es en esta intersección donde el perro robot dual emerge como una propuesta revolucionaria, combinando la robustez de la locomoción cuadrúpeda con la velocidad de las ruedas y la versatilidad de la modularidad.
Inspiración en la naturaleza para la locomoción
La diversidad de la locomoción en el reino animal es vasta y fascinante. Desde la elegante zancada de un guepardo hasta el deslizamiento eficiente de una serpiente o el nado potente de un pez, cada mecanismo ha evolucionado para optimizar el movimiento en un entorno específico. En la robótica, esto se ha traducido en el desarrollo de patas articuladas para emular la marcha terrestre, orugas y ruedas para terrenos planos o ligeramente irregulares, y hélices o aletas para el aire y el agua. La elección del modo de locomoción es crítica, ya que cada uno tiene sus ventajas y desventajas inherentes. La marcha, aunque energéticamente costosa en comparación con el rodaje en superficies lisas, ofrece una adaptabilidad inigualable para superar obstáculos, subir pendientes pronunciadas o transitar por terrenos completamente irregulares. Las ruedas, por otro lado, son extraordinariamente eficientes y rápidas en superficies pavimentadas o firmes, pero se ven limitadas por el más mínimo obstáculo. La verdadera innovación reside en la capacidad de un robot para transcender estas limitaciones inherentes, integrando múltiples modos de locomoción y eligiendo dinámicamente el más adecuado para cada situación. Este perro robot no solo camina o rueda, sino que lo hace de forma inteligente, optimizando su desplazamiento en tiempo real. Para aquellos interesados en la ciencia de la locomoción robótica inspirada en la biología, existen numerosas investigaciones que profundizan en este fascinante campo, como las publicadas por la IEEE Robotics and Automation Society.
Adaptabilidad como clave del éxito
En un mundo cada vez más dinámico y con entornos impredecibles, la adaptabilidad se ha convertido en una característica indispensable para los sistemas robóticos avanzados. Un robot que puede funcionar eficazmente solo bajo condiciones controladas tiene un valor limitado fuera de fábricas o laboratorios. La capacidad de un robot para percibir su entorno, analizar los desafíos presentes y modificar su comportamiento o incluso su configuración física para superarlos, es lo que define su verdadera utilidad. La naturaleza nos enseña esta lección constantemente: organismos que pueden camuflarse, cambiar su forma o incluso regenerar partes de su cuerpo son los que mejor sobreviven y prosperan. En robótica, esta adaptabilidad se manifiesta a través de sensores avanzados, algoritmos de inteligencia artificial para la toma de decisiones y, lo que es más radical, diseños modulares y reconfigurables. El concepto de un robot que puede dividirse para acceder a espacios estrechos o que puede rodar en una autopista y luego caminar por un camino de tierra, encapsula esta filosofía de diseño adaptable. Es esta versatilidad la que permite a un robot no solo existir en un entorno, sino dominarlo, sin importar cuán complejo o cambiante sea.
El innovador diseño del perro robot dual
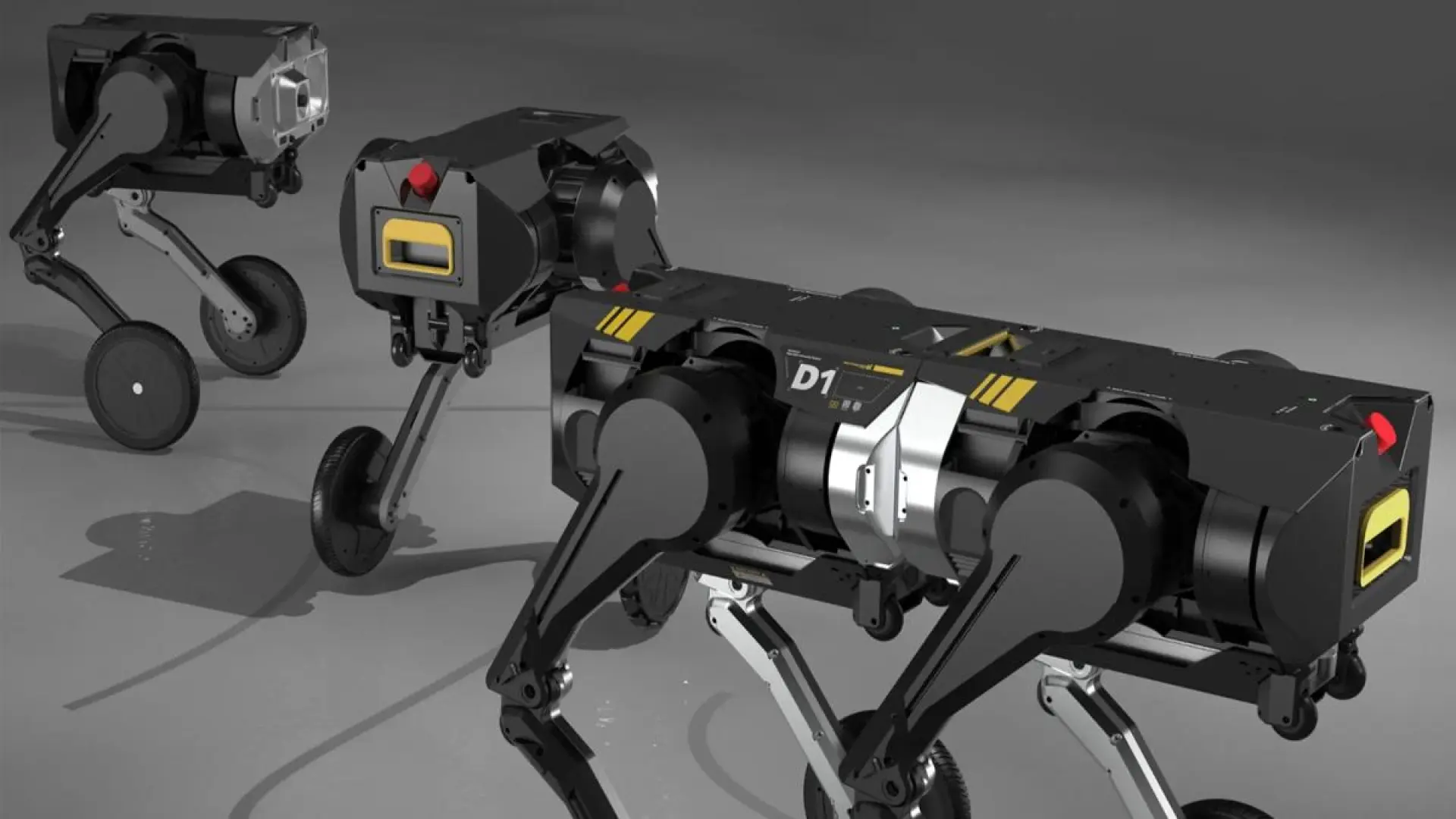
Este nuevo perro robot no es simplemente otro cuadrúpedo avanzado; es una plataforma robótica que redefine la versatilidad. Su arquitectura es un testimonio de ingeniería avanzada, fusionando la fuerza y el equilibrio de la locomoción con patas con la velocidad y eficiencia de las ruedas, y añadiendo una capacidad de reconfiguración estructural que lo distingue de cualquier otro en su clase. El diseño es intrincado y cuidadosamente pensado para permitir una transición fluida entre sus diferentes modos de operación. En su estado "completo", puede operar como un solo robot, utilizando sus patas para atravesar terrenos difíciles o desplegando ruedas (quizás integradas en las patas o en la parte inferior del cuerpo) para moverse rápidamente en superficies lisas. Sin embargo, la verdadera magia radica en su capacidad para transformarse, descomponiéndose en dos entidades robóticas independientes. Esta modularidad no es solo una característica; es una estrategia fundamental para superar las limitaciones impuestas por el tamaño y la forma de un robot monolítico, permitiéndole abordar un espectro mucho más amplio de tareas y entornos.
Mecanismos de locomoción: de la marcha al rodaje
La integración de múltiples modos de locomoción en un único sistema robótico es un desafío de ingeniería considerable. En el caso de este perro robot, la transición de la marcha al rodaje (y viceversa) debe ser no solo eficiente, sino también suave y robusta. Cuando hablamos de "caminar", nos referimos a un control sofisticado de múltiples articulaciones para simular la marcha cuadrúpeda, ofreciendo estabilidad y capacidad de superar obstáculos. Esto requiere motores potentes, sensores de fuerza y posición, y algoritmos de control que ajusten dinámicamente el centro de masa del robot. Para el "rodaje", es probable que el robot incorpore ruedas retráctiles o convertibles en sus extremidades o en su estructura ventral. La clave aquí es la velocidad y la eficiencia energética en superficies uniformes. Imaginen un robot que, al detectar una carretera pavimentada, pliega sus "patas" y despliega sus ruedas, acelerando para cubrir largas distancias con un consumo mínimo de energía. Al llegar a una zona de escombros o un terreno rocoso, las ruedas se retraen y las patas vuelven a activarse, permitiendo una progresión cuidadosa. Personalmente, encuentro esta capacidad dual fascinante. Demasiados robots están optimizados para un solo tipo de terreno, lo que limita su utilidad. Un sistema que puede alternar entre estas dos modalidades no solo ahorra tiempo, sino que también amplía enormemente su rango operativo y su potencial de misión. La ingeniería detrás de estas transiciones es compleja, pero el resultado es un robot intrínsecamente más capaz.
La función de división: un avance en flexibilidad
La capacidad de este perro robot para dividirse en dos unidades es, sin duda, su característica más innovadora y disruptiva. Esta funcionalidad va más allá de la simple locomoción adaptable; introduce un nivel de flexibilidad estructural sin precedentes. Cuando el robot encuentra un obstáculo insuperable para una sola unidad (por ejemplo, un túnel demasiado estrecho o una puerta bloqueada que requiere manipulación simultánea de dos puntos), puede iniciar un proceso de división. Este mecanismo implicaría puntos de conexión robustos que pueden desacoplarse de manera segura y precisa, junto con sistemas de energía y control redundantes para asegurar que cada nueva unidad sea completamente funcional e independiente.
Pensemos en las implicaciones:
- Acceso a espacios confinados: Una unidad puede explorar un conducto estrecho mientras la otra examina un área adyacente más grande.
- Tareas colaborativas: Las dos unidades pueden trabajar en conjunto para levantar un objeto pesado, abrir una puerta compleja o realizar una inspección desde dos ángulos diferentes.
- Redundancia y resiliencia: Si una unidad queda inhabilitada, la otra puede continuar la misión o incluso intentar un rescate.
- Exploración simultánea: Dos áreas diferentes pueden ser exploradas al mismo tiempo, duplicando la eficiencia de la misión.
Esta característica de división no es solo un truco ingenieril; es una declaración sobre el futuro de la robótica modular. Personalmente, creo que esta capacidad de "multitarea física" es lo que realmente distingue a este robot. Otros robots pueden ser modulares en el sentido de que sus herramientas son intercambiables, pero este puede cambiar su propia ontología como entidad física. Es un avance que podría sentar las bases para una nueva generación de robots altamente adaptables y multifuncionales.
Aplicaciones potenciales y escenarios de uso
La combinación única de locomoción dual y capacidad de división convierte a este perro robot en una herramienta excepcionalmente versátil con un vasto potencial en una multitud de sectores. Su diseño intrínsecamente adaptable lo hace ideal para entornos que son demasiado peligrosos, remotos o inaccesibles para los humanos, o donde la eficiencia operativa puede mejorarse drásticamente mediante la automatización inteligente.
Exploración y rescate
Uno de los campos donde este tipo de robot podría tener un impacto más profundo es en la exploración y el rescate. Tras desastres naturales como terremotos, tsunamis o colapsos estructurales, los equipos de rescate a menudo se enfrentan a escombros inestables, espacios confinados y condiciones peligrosas. Un robot capaz de caminar por terreno irregular y luego rodar rápidamente por pasillos despejados, y que además puede dividirse para que una de sus partes se deslice por una grieta estrecha en busca de supervivientes, cambiaría las reglas del juego. Las dos unidades podrían buscar en diferentes direcciones o cooperar para mover escombros ligeros. La integración de sensores avanzados para detectar señales de vida (térmicas, acústicas) y la capacidad de transmitir video en tiempo real, lo convertirían en un ojo y oído invaluable para los socorristas, salvando vidas y minimizando el riesgo para el personal humano. Para saber más sobre los esfuerzos en robótica para misiones de rescate, puede consultar organizaciones como el Center for Robotics and Intelligent Machines de Georgia Tech, que a menudo participa en competiciones y proyectos de robótica para desastres.
Logística y almacenes inteligentes
En el sector de la logística, la eficiencia es primordial. Los almacenes modernos son vastos y complejos, con una mezcla de pasillos anchos para vehículos y áreas estrechas para almacenamiento densificado. Un perro robot con la capacidad de rodar rápidamente por los pasillos principales, transportar inventario y luego cambiar a modo de marcha para navegar por áreas congestionadas o subir estanterías, ofrecería una flexibilidad sin igual. La función de división podría ser particularmente útil para tareas de inventario, donde una unidad podría escanear un pasillo mientras la otra accede a un estante específico que requiere una manipulación más delicada o un espacio de maniobra limitado. Esto no solo aumentaría la velocidad de las operaciones, sino que también optimizaría el uso del espacio y reduciría la necesidad de diferentes tipos de robots para distintas tareas. La optimización en estos entornos es un tema constante de investigación en robótica logística, como se puede ver en los trabajos sobre automatización de almacenes inteligentes.
Inspección y mantenimiento de infraestructuras críticas
La inspección de infraestructuras como tuberías, puentes, túneles, reactores o plataformas petrolíferas es a menudo peligrosa y costosa. Este robot podría ser la solución ideal. En su forma completa, podría inspeccionar grandes superficies o tramos de tuberías amplios. Al encontrar una sección estrecha o un conducto de difícil acceso, la capacidad de dividirse permitiría que una unidad más compacta continuara la inspección interna, mientras la otra mantiene una posición externa o realiza una inspección paralela. Imaginen la inspección de las alas de un avión o de las palas de un aerogenerador; una unidad podría recorrer una superficie mientras la otra se encarga de un componente específico que requiere una inspección detallada. Esto no solo mejora la seguridad, sino que también aumenta la precisión y la frecuencia de las inspecciones, detectando problemas antes de que se conviertan en fallas catastróficas.
Asistencia en entornos complejos y respuesta a emergencias
Más allá de la exploración y la logística, la versatilidad de este robot podría encontrar nichos en la asistencia en entornos complejos, como plantas industriales con maquinaria pesada, laboratorios con zonas de contención, o incluso hospitales con áreas de aislamiento. Podría ser desplegado para entregar materiales, monitorear condiciones ambientales peligrosas o proporcionar apoyo en situaciones de emergencia donde la intervención humana es arriesgada. La capacidad de división añade una capa de resiliencia: si una unidad se ve comprometida, la otra puede seguir operando o retirarse de forma segura. En respuesta a emergencias químicas o radiológicas, por ejemplo, podría recoger muestras y mapear la extensión del peligro, con la ventaja de que dos unidades separadas podrían cubrir un área mayor o realizar una medición redundante para mayor fiabilidad.
Investigación científica y desarrollo de nuevas plataformas
Finalmente, este perro robot modular y adaptable representa una plataforma invaluable para la investigación científica en el campo de la robótica. Los investigadores podrían utilizarlo para desarrollar y probar nuevos algoritmos de control para la locomoción híbrida, explorar estrategias de coordinación para robots colaborativos (tanto en su forma completa como dividida), o experimentar con nuevos diseños de sensores y actuadores. La capacidad de reconfiguración física abre nuevas vías para estudiar la inteligencia colectiva y la adaptación en sistemas robóticos complejos. Se convierte en un banco de pruebas para el futuro de la inteligencia artificial encarnada y la robótica multi-agente, donde la interacción física con el entorno y entre las propias unidades robóticas es tan crucial como su programación.
Desafíos técnicos y consideraciones futuras
A pesar de su prometedor potencial, la materialización de un perro robot con estas capacidades duales y de división presenta una serie de desafíos técnicos y operacionales que deben ser abordados con rigor. La ingeniería de sistemas robóticos complejos no solo implica la creación de componentes individuales avanzados, sino también la integración fluida de estos componentes en un todo coherente y funcional. Los obstáculos van desde la gestión de la energía y la robustez mecánica hasta la inteligencia artificial necesaria para la toma de decisiones autónomas y la interacción segura con el entorno.
Autonomía energética y gestión eficiente de recursos
La locomoción de un robot, especialmente la marcha bípeda o cuadrúpeda, es inherentemente intensiva en energía. Añadir la capacidad de rodar, junto con la sofisticación mecánica y electrónica necesaria para dividirse en dos unidades independientes, amplifica significativamente los requisitos energéticos. Cada motor, cada sensor, cada chip de procesamiento consume energía. La gestión de la batería se vuelve crítica: no solo debe ser de alta densidad energética para asegurar una autonomía aceptable, sino que el sistema debe ser capaz de distribuir eficientemente esa energía entre los diferentes modos de locomoción y entre las dos unidades una vez divididas. Esto implica sistemas de recarga rápida o incluso capacidades de "cosecha" de energía del entorno, así como algoritmos de gestión energética que optimicen el rendimiento en función de la tarea y la carga restante. Este es un campo de investigación activo en la revista IEEE Spectrum, sección de robótica.
Robustez, fiabilidad y mantenimiento de sistemas modulares
Los mecanismos de conexión y desconexión que permiten al robot dividirse deben ser excepcionalmente robustos y fiables. La exposición a entornos hostiles (polvo, humedad, vibraciones, impactos) no debe comprometer la integridad de estas uniones ni la funcionalidad de las unidades resultantes. Los actuadores, sensores y sistemas de cableado que se extienden a través de estos puntos de conexión modular deben estar diseñados para soportar ciclos repetidos de acoplamiento y desacoplamiento sin fallar. Además, el mantenimiento de un sistema tan complejo podría ser más exigente, requiriendo diagnósticos sofisticados y posiblemente un diseño que facilite el reemplazo de módulos o componentes. La durabilidad y la longevidad en condiciones operativas reales son cruciales para la viabilidad a largo plazo de este tipo de tecnología.
Algoritmos de control avanzado y toma de decisiones autónoma
La inteligencia que gobierna este robot debe ser de un nivel superior. Decidir cuándo caminar y cuándo rodar, cuándo dividirse y cuándo reunirse, y cómo coordinar las acciones de las dos unidades divididas, requiere algoritmos de contro